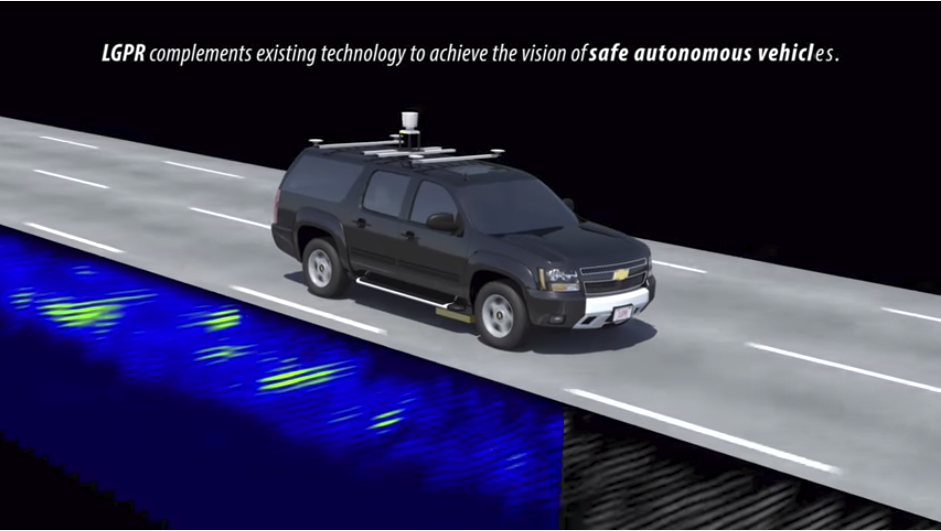
The localizing ground-penetrating radar (LGPR) sends high frequency (VHF) electromagnetic pulses underground to identify a vehicle’s location, even in snow and rain.
MIT, Lab Develop Tech for Overcoming Vehicle Weather Blindness
One of the biggest problems self-driving cars have is that a snowstorm, rain, heavy fog and dust storms can render their sensors useless to minimally effective at any given time. A new development by the Massachusetts Institute of Technology’s Computer Science and Artificial Intelligence Laboratory (CSAIL) and MIT’s Lincoln Laboratory may offer a solution.
“In a paper that will be published in the journal IEEE Robotics and Automation Letters later this month and presented in May at the International Conference on Robotics and Automation (ICRA), they describe a system that uses ground-penetrating radar (GPR) to send very high frequency (VHF) electromagnetic pulses underground to measure an area’s combination of pipes, roots, rocks, dirt, and other features,” says a story on venturebeat.com. The GPR builds a basemap that an onboard computer correlates, contributing to a three-dimensional GPS-tagged subterranean database.”
The ground penetrating radar is already being used lunar exploration, construction planning and landmine detection, according to the story. The success of its use would depend on other detectors working in tandem, since it doesn’t do as well in heavy rain, but is a better alternative when visibility is next to nil than radar, lidar, cameras and GPS.
Here’s how it works, according to Lincoln Laboratory:
“Localizing Ground-Penetrating Radar (LGPR) uses very-high-frequency (VHF) radar reflections of underground features to generate baseline maps and then matches current GPR reflections to those maps to estimate a vehicle’s location. LGPR uses relatively deep subsurface features as points of reference because these features are inherently stable and less susceptible to erosion or damage over time. It utilizes VHF radio waves because they can penetrate rain, fog, dust, and snow. Because all sensors can fail, the best way to achieve robustness is to fuse several independent approaches so no one failure mode causes a significant lane-keeping error.”
The technology MIT developed, called WaveSense, has raised money for developing it into a viable product, considering that it would take tremendous investment to scan each road individually.
read more at venturebeat.com




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave A Comment